The challenge: Complete the following stages:
- Control TurtleBots with Joystick
- Read and monitor inputs from the camera and IR sensors
- Detect and yield Stop signs
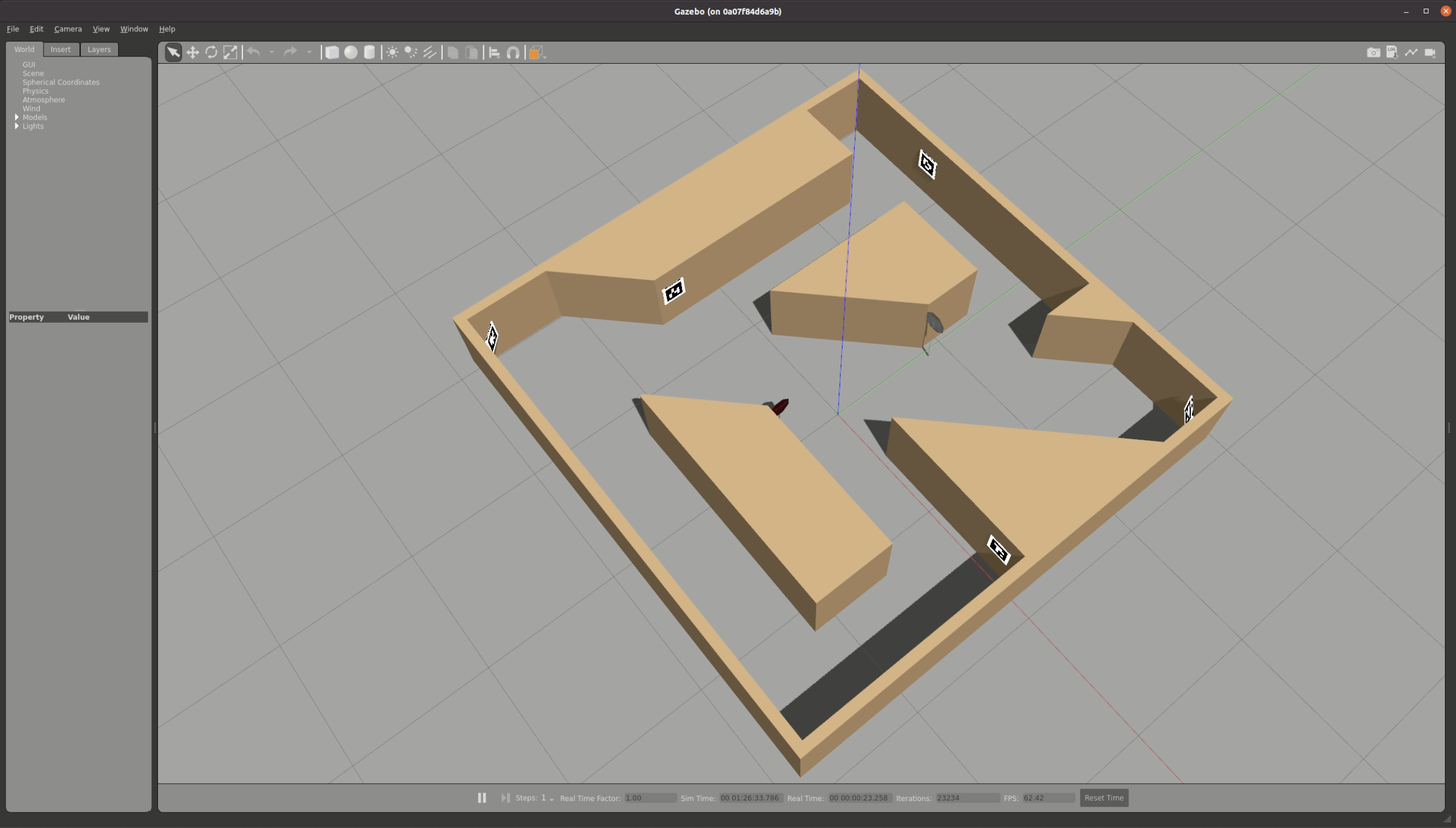
- Navigate the course, complete one lap
- Fleet management for multiple TurtleBots
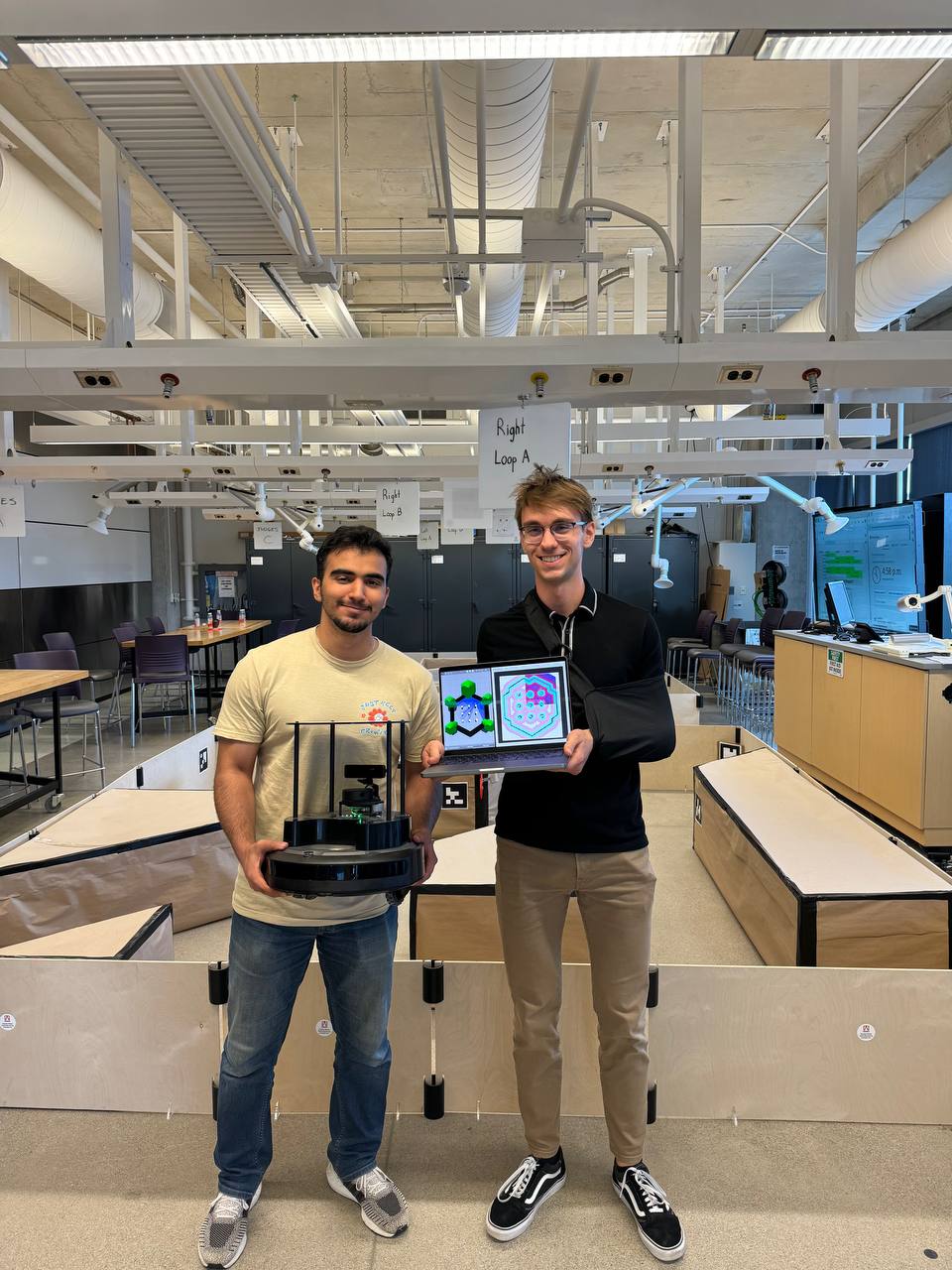
Results: Only group to complete all 5 stages of the challenge
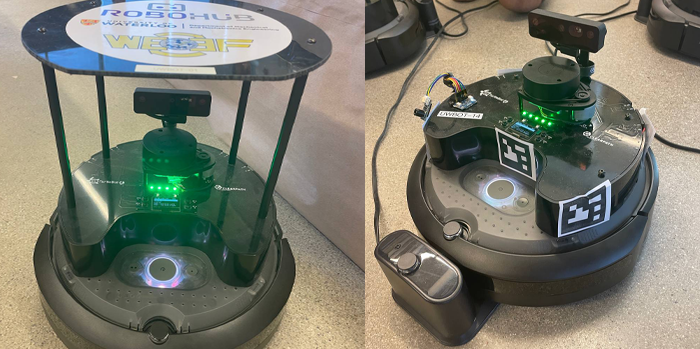
The image above shows the TurtleBots provided to us by IDEAs Clinic Center
Upon entering the challenge we divided our tasks and came up with a list of goals:
- PID controller for navigation
- Stop sign detection using Camera sensor and ML model
- Stop sign yield navigation logic
- Simple SLAM model for fleet management
Given the short duration of the challenge we had difficulties integrating the PID controller so as a shortcut we used the joystick module for the demo.
Leave A Comment