The challenge: Take a picture of the car when the front wheel of passes an indicated post.
Results: Fastest group to finish, Won the best presentation award.
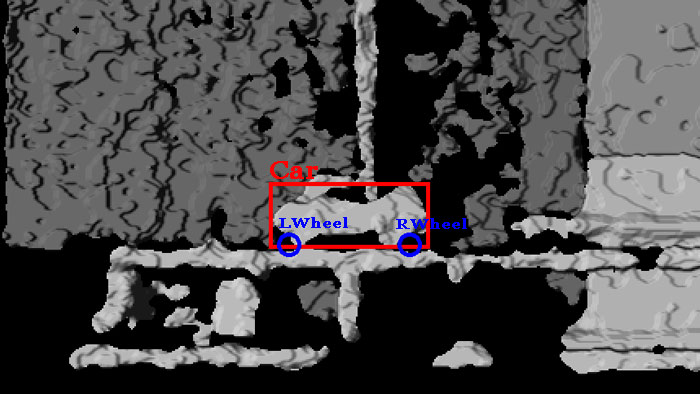
The white vertical object in the photo is indicator post and as soon as the Right Wheel crossed the post the following screenshot was taken.
Using computer vision, developed a program in C++ that detects, marks and tracks Toyota Cars. With the use of an Astra Series-Orbbec 3D camera the program initially maps the picture into Cartesian coordinates. The depth sensors allows us to dive into the third dimension, z-axis. The product image is then filtered to only save depths in black and white for faster computation time.
To detect the car, we initially narrowed the capture depth to only the track the car was meant to be in, then the height range we expect the car to be in. In this rectangular prism we look for an object with a height and width of over 15cm, draw a rectangle around it and we set that as our car. Next we look at the bottom corners of the rectangle, search for circular patterns and draw circles where the program seems fit.
Finally we take a screenshot of the console window once the front wheel x-cordinate passes our post’s x-cordinate.



Leave A Comment